


Bluetooth Robot Car Controller
Bluetooth Robot Car Controller介绍
Tilt your smartphone to control your own Robot. Here is a simple project to control your Robot/Robo Car using Bluetooth Module HC-05 & 89c2051 Microcontroller with your Android Smartphone device. In this project the accelerometer of your android Smartphone is used to detect the tilt movement angle of Smartphone, just tilt your mobile Forward, Backward, Left and Right to control the direction of Robot.
You can download Circuit & HEX File here http://www.hobbyprojects.com/bluetooth-device-control/
App Instructions:
1. First make sure your HC-05 Bluetooth Module is paired with your mobile. The default password for pairing is "1234" or "0000". Check the manual of Bluetooth module.
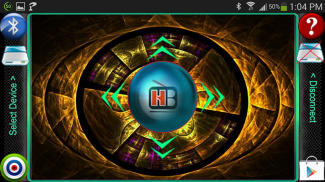
2. Click on "SELECT DEVICE" icon to select paired Bluetooth module.
3. When you tilt mobile "FORWARD" it sends the data "A" to Bluetooth Module connected with the circuit. When Microcontroller detects "A" the Robot / Robot Car moves FORWARD.
4. When you tilt mobile "BACKWARD" it sends the data "B" to Bluetooth Module connected with the circuit. When Microcontroller detects "B" the Robot / Robot Car moves REVERSE.
5. When you tilt mobile "LEFT" it sends the data "C" to Bluetooth Module connected with the circuit. When Microcontroller detects "C" the Robot / Robot Car turns LEFT.
6. When you tilt mobile "RIGHT" it sends the data "D" to Bluetooth Module connected with the circuit. When Microcontroller detects "D" the Robot / Robot Car turns RIGHT.
7. When the mobile phone is not tilted in any direction (screen upward position), it sends the data "E" to Bluetooth Module connected with the circuit. When Microcontroller detects "E" the Robot / Robot Car gets STOPPED. You can also stop the robot by pressing STOP button which is in the center of remote.
倾斜你的智能手机来控制自己的机器人。下面是一个简单的项目使用蓝牙模块HC-05与89C2051单片机与您的Android智能手机设备来控制你的机器人/机器人汽车。在这个项目中的Android智能手机的加速计用于检测智能手机的倾斜运动角度,只是倾斜你的移动前进,后退,左,右来控制机器人的方向。
您可以下载电路与HEX文件在这里http://www.hobbyprojects.com/bluetooth-device-control/
应用说明:
1.首先要确保您的HC-05蓝牙模块搭配您的手机。对于配对的默认密码是“1234”或“0000”。检查蓝牙模块的手册。
2.单击“选择设备”图标,选择配对的蓝牙模块。
3.当你倾斜手机“前进”发送与电路连接的数据“A”到蓝牙模块。当单片机检测到“A”的机器人/机器人车向前移动。
4.当你倾斜手机“落后”发送与电路连接的数据“B”蓝牙模块。当单片机检测到“B”的机器人/机器人车载移动反向。
5.当你倾斜手机“左”发送与电路连接的数据“C”蓝牙模块。当单片机检测到“C”的机器人/机器人汽车转向左边。
6.当你倾斜手机“RIGHT”发送数据“D”到蓝牙模块的电路连接。当单片机检测到“D”机器人/机器人车子向右转。
7.当移动电话没有在任何方向(屏幕的向上位置)倾斜,它发送与该电路连接在数据“E”到蓝牙模块。当单片机检测到“E”机器人/机器人汽车被已停止。您也可以通过按STOP按钮是在偏远的中心停止机器人。
Bluetooth Robot Car Controller - 版本1.0
(07-12-2018)Bluetooth Robot Car Controller - APK信息
APK版本: 1.0程序包: appinventor.ai_hobbyprojects_com.BluetoothRoboControllerBluetooth Robot Car Controller的最新版本














同类应用









